Bridging the Gap: From Simulation to Real-World Robotics
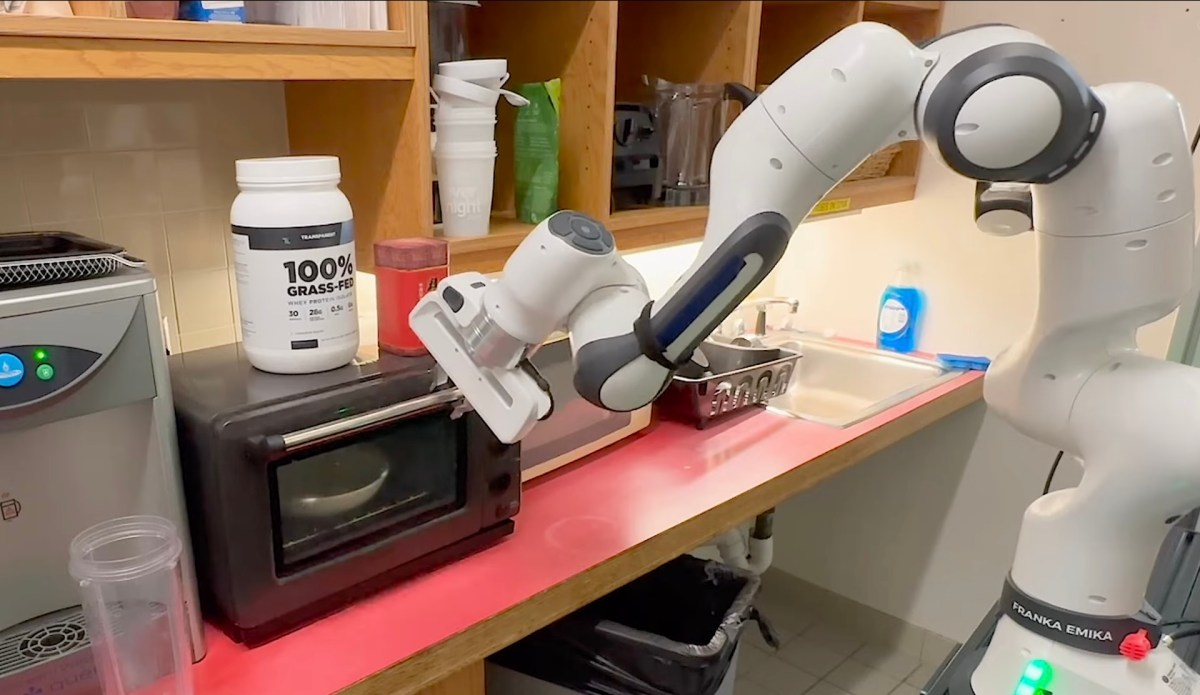
MIT CSAIL researchers have developed a groundbreaking method to train home robots using iPhone scans of real environments. This innovative approach addresses the longstanding challenge of adapting robots to diverse and dynamic home settings. By leveraging the power of simulation and the accessibility of smartphone technology, this technique promises to accelerate the development of more versatile and capable home robots.
Key Advancements in Robot Training
- Utilizes iPhone scans to create accurate simulations of home environments
- Enables robots to practice tasks millions of times without real-world consequences
- Enhances adaptability to different layouts, lighting conditions, and surface types
- Builds a robust database of environments to improve robot performance in dynamic settings
Implications for the Future of Home Robotics
This research underscores the potential for more widespread adoption of non-vacuum robots in homes. By addressing the challenges of unstructured environments, the technique paves the way for robots that can navigate and interact with diverse household settings more effectively. As the database of simulated environments grows, robots will become increasingly adept at handling unexpected changes and variations in real-world scenarios, bringing us closer to the reality of versatile home robots that can assist with a wide range of tasks.