As humanoid robots evolve from single-purpose to general-purpose systems, researchers emphasize the importance of developing robust robotic intelligence. MIT’s latest research highlights the transformative potential of generative AI in enhancing these systems. Traditional training methods for robots, such as reinforcement and imitation learning, are being augmented by advanced AI models. A notable innovation from MIT is the policy composition (PoCo) method, which synthesizes information from diverse task-specific datasets to improve robotic performance. By training diffusion models on individual tasks and then combining these models, robots can execute complex actions and adapt to new tasks more effectively. This approach has shown a 20% improvement in task performance, enabling robots to use multiple tools and adapt to unfamiliar scenarios. The ultimate aim is to develop multi-purpose robotic systems, bringing the industry closer to achieving versatile, general-purpose humanoid robots.
Revolutionizing Robotics – MIT’s Generative AI Boosts Humanoid Capabilities
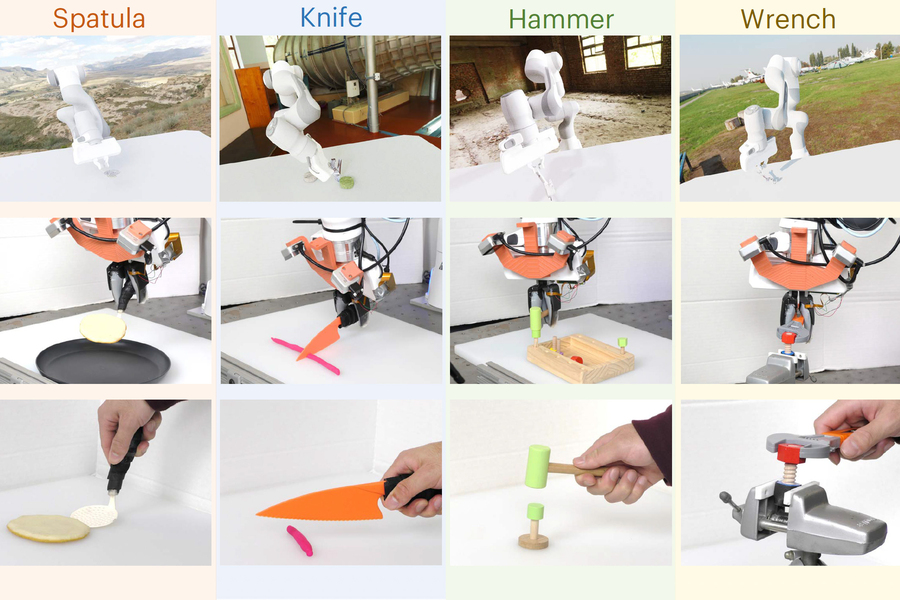
MIT’s PoCo method enables robots to combine task-specific policies for enhanced performance.
1–2 minutes
TOP STORIES

Unauthorized users have gained access to Anthropic’s Mythos, raising security concerns …

Clarifai has deleted millions of photos from OkCupid amid an FTC investigation into data misuse …

Nvidia’s Vera Rubin platform is set to revolutionize AI inference with unmatched performance …

Apple’s leadership transition highlights a strategic focus on silicon for AI innovation …

Apple’s leadership changes signal a strategic shift towards AI and silicon innovation …

Tennessee’s new law restricts AI claims in mental health but may create loopholes …



