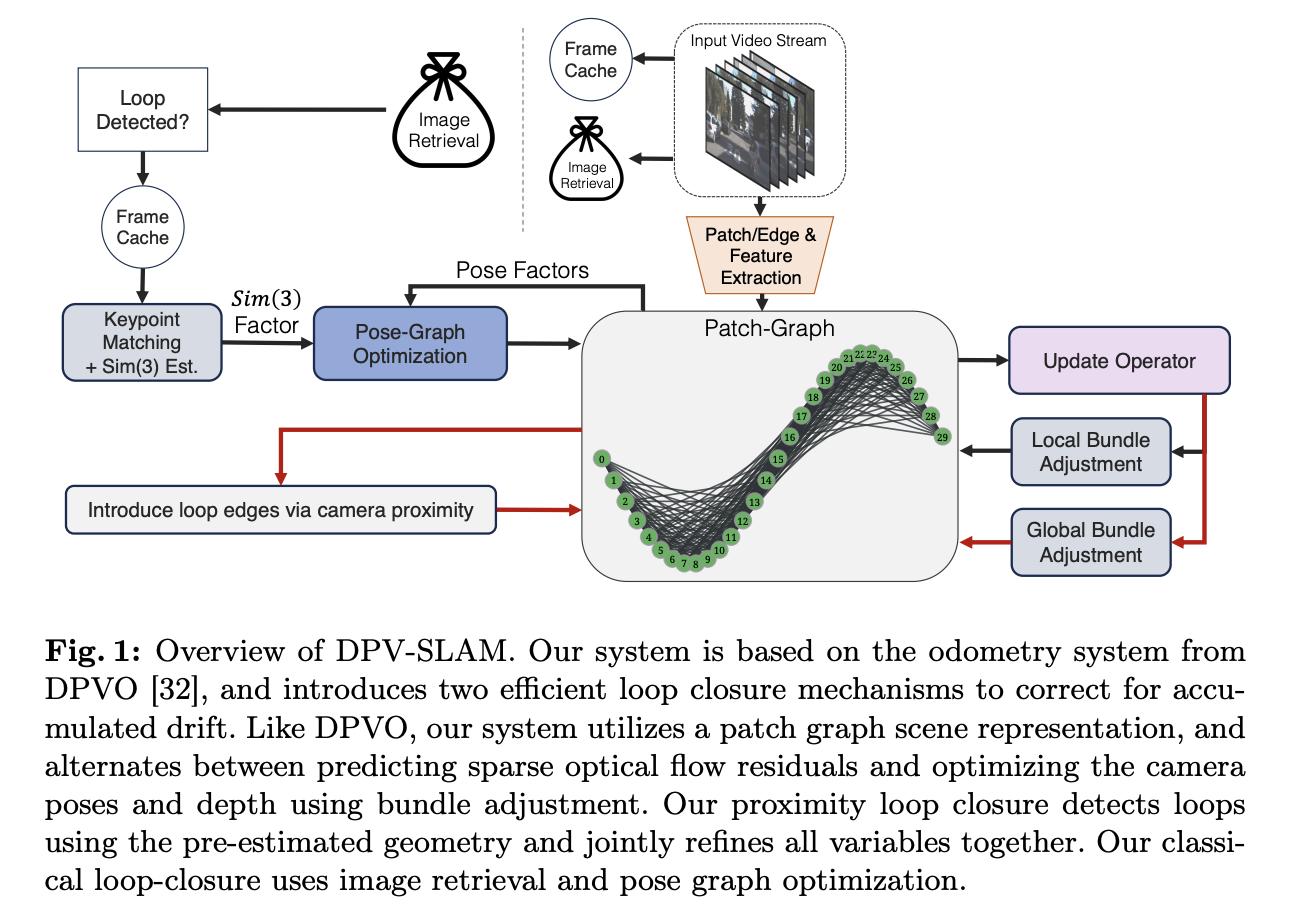
Overview of DPV-SLAM
Visual Simultaneous Localization and Mapping (SLAM) is vital in robotics and computer vision. It enables real-time state estimation for tasks like depth estimation and 3D human pose reconstruction. However, achieving high tracking accuracy with monocular video remains challenging, especially without inertial measurements. Traditional SLAM methods often require powerful GPUs, limiting their real-time application. Recent innovations in SLAM, including deep learning approaches, have shown promise but often fall short in practical use due to their focus on specific environments or computational demands.
Key Features of DPV-SLAM
- DPV-SLAM is an advanced version of the DPVO odometry system that tackles deep SLAM limitations.
- It introduces a novel loop closure mechanism that enhances performance and addresses common issues.
- The method employs both proximity and classical loop closure techniques to correct drift effectively.
- DPV-SLAM shows superior results across multiple datasets, achieving high accuracy and speed while using fewer resources.
Importance of DPV-SLAM in the Field
The development of DPV-SLAM marks a significant step forward in SLAM technology. It balances efficiency and accuracy, making it suitable for various applications in computer vision. By operating at high frame rates and requiring less memory, DPV-SLAM offers a practical solution for real-time scenarios. Its performance across different datasets demonstrates its versatility. Despite some limitations, its contributions to the field can lead to more reliable and efficient SLAM systems, ultimately benefiting robotics and related technologies.









